電話咨詢:010-50911009
中國汽車工程學(xué)會
科創(chuàng)中國
登錄

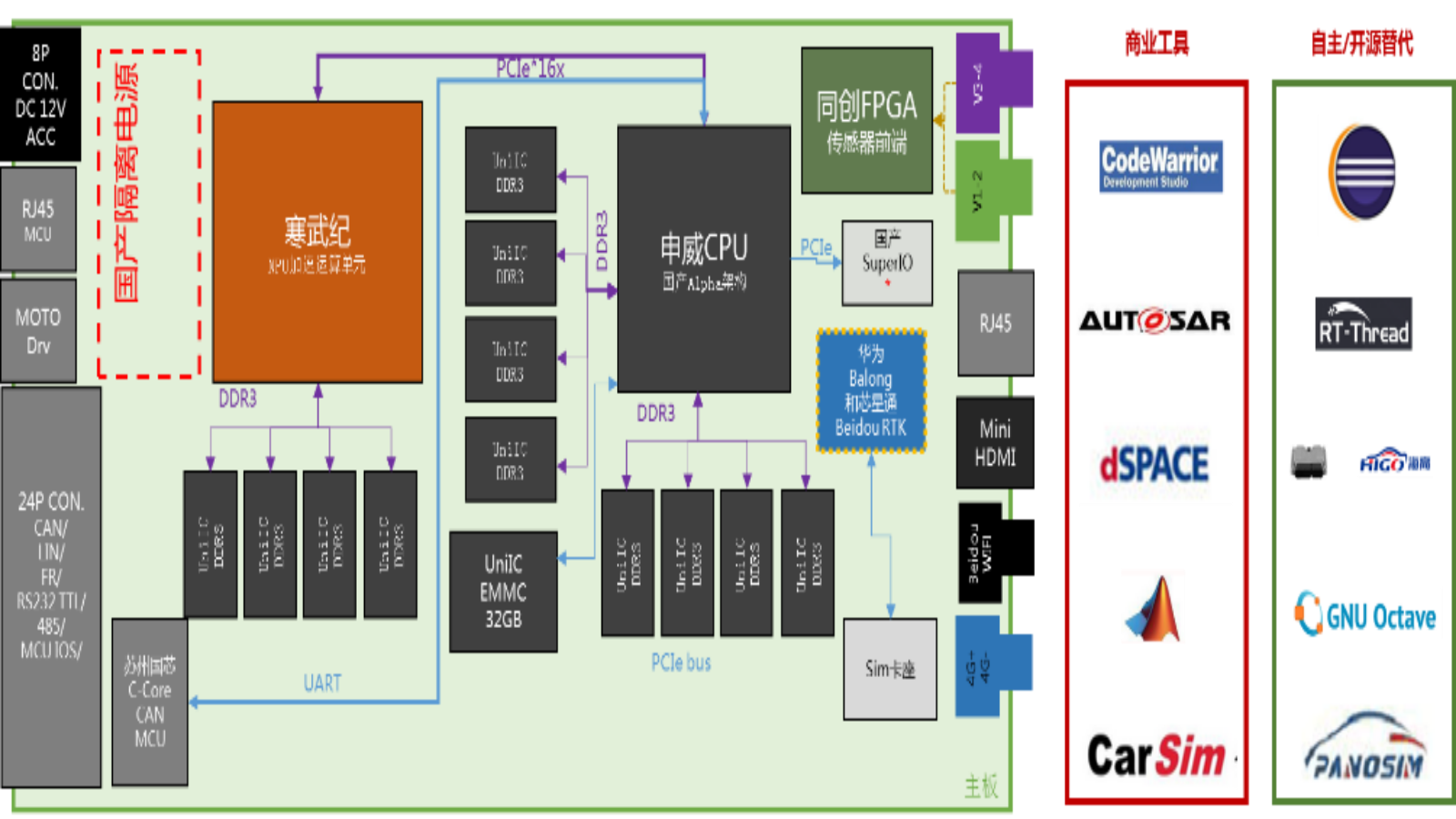
瞄準(zhǔn)中國自主可控智能網(wǎng)聯(lián)汽車計算單元的國家戰(zhàn)略需求,開展中國設(shè)計中國制造的智能網(wǎng)聯(lián)汽車專用高性能控制器研發(fā)。
? 智能汽車中央域控計算平臺:實(shí)現(xiàn)視覺、雷達(dá)、高精定位等多傳感器信息融合、可行駛區(qū)域動態(tài)建模及預(yù)期行駛軌跡多目標(biāo)決策。
? 智能汽車底盤運(yùn)動控制平臺:實(shí)現(xiàn)汽車運(yùn)動控制和底盤線控化。

教授

本成果核心包括四輪轉(zhuǎn)向控制和后橋線控轉(zhuǎn)向結(jié)構(gòu)關(guān)鍵技術(shù)。四輪轉(zhuǎn)向控制包括后輪隨動式控制、前饋/反饋+失效容錯式控制和后橋線控轉(zhuǎn)向+分布式四驅(qū)差動轉(zhuǎn)向的協(xié)同控制。后橋線控轉(zhuǎn)向結(jié)構(gòu)關(guān)鍵技術(shù)包括低成本后軸轉(zhuǎn)向驅(qū)動方案、后橋線控轉(zhuǎn)向彈簧自回正方案和一種可實(shí)現(xiàn)理想阿克曼轉(zhuǎn)角關(guān)系的汽車轉(zhuǎn)向系統(tǒng)。

副教授
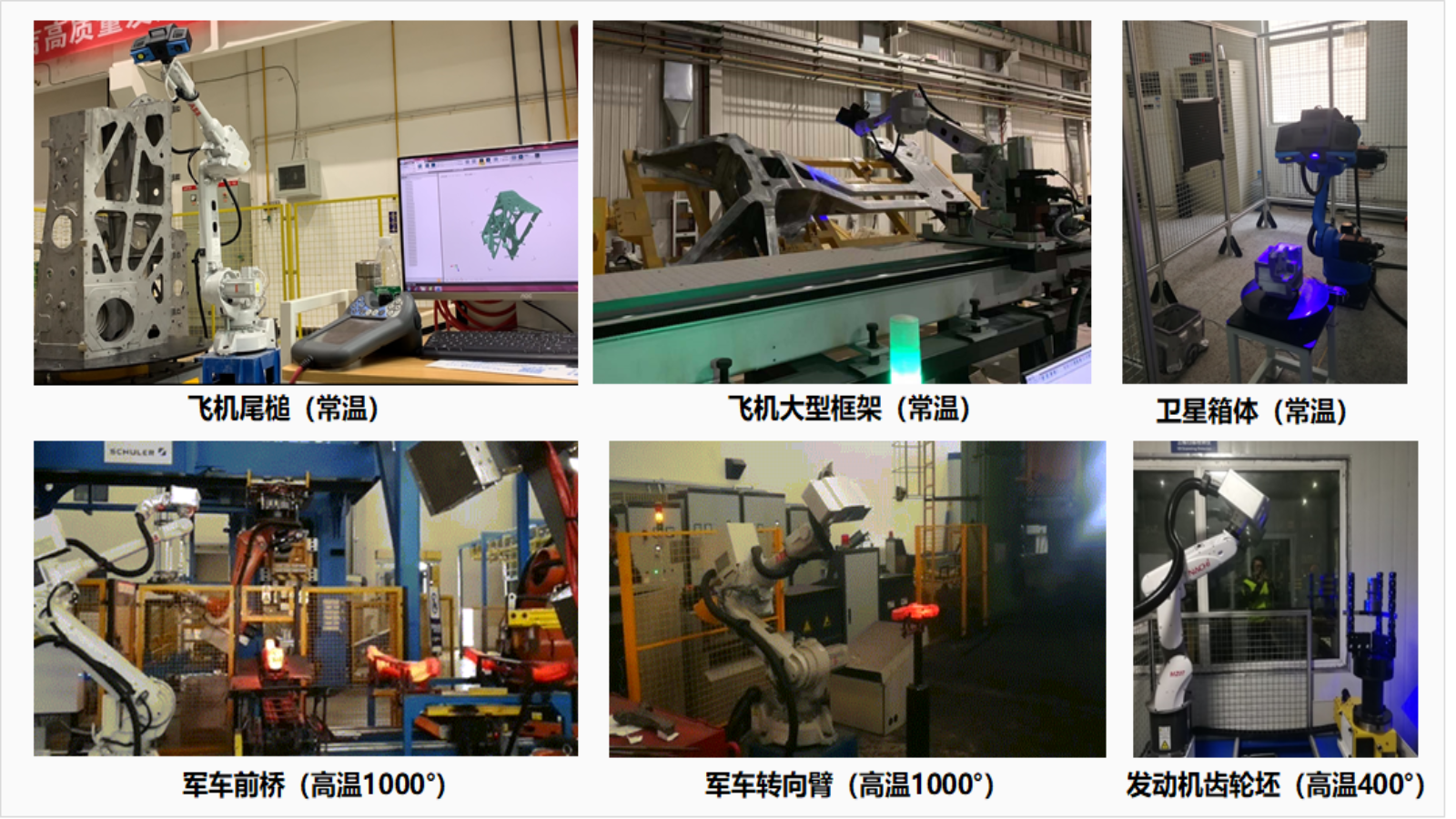
項(xiàng)目團(tuán)隊(duì)將面結(jié)構(gòu)光測量和工業(yè)機(jī)器人相結(jié)合,攻克了高精度三維測量、測量路徑自動規(guī)劃、數(shù)據(jù)自動處理等關(guān)鍵技術(shù),研制了系列自動化在線三維測量裝備,國際首次在線實(shí)現(xiàn)了1100℃熱模鍛件三維尺寸的全測全檢。廣泛應(yīng)用于國內(nèi)規(guī)模最大的前橋、轉(zhuǎn)向節(jié)、曲軸、齒輪等汽車關(guān)鍵鍛件生產(chǎn)企業(yè),提升了企業(yè)的技術(shù)水平和國際競爭力;還應(yīng)用于黎明、安大、景航等航空企業(yè),提升了葉片、導(dǎo)熱內(nèi)環(huán)等航空鍛件的精度,支撐了重要國防裝備的自主研制。

教授
本項(xiàng)目提供了一種寬基載重子午線輪胎成型機(jī)帶束鼓及設(shè)計方法,將帶束鼓的中間段設(shè)計為凸出的曲面結(jié)構(gòu),帶束鼓表面的輪廓線由兩段直線段與位于兩直線段間的弧形段組成,通過輪胎成型仿真模擬,以簾線伸張率和胎面膠料流動均勻性作為判斷標(biāo)準(zhǔn),優(yōu)選確定最佳參數(shù)。本發(fā)明有效控制帶束層的簾線伸張率,徹底解決定型時帶束層簾線受力不均勻的問題,消除了機(jī)內(nèi)定型過程中寬基輪胎胎肩膠料向胎冠中心流動的異常現(xiàn)象,提高了輪胎綜合性能。

副教授

一種新型的汽車后視鏡便攜式全自動全功能檢測設(shè)備,應(yīng)用于后視鏡加工廠的性能檢測。能實(shí)現(xiàn)全品牌全功能的自動檢測。目前市面上都是簡易的較少功能可滿足的手動檢測盒。能避免檢測過程人為因素造成的誤檢。

教授
提出一種智能電動汽車轉(zhuǎn)向和制動自適應(yīng)動態(tài)協(xié)調(diào)控制系統(tǒng)及方法,可有效克服車輛轉(zhuǎn)向、制動動力學(xué)的非線性耦合和參數(shù)不確定性等特性,消除了對控制模型的依賴,增強(qiáng)了控制系統(tǒng)對參數(shù)不確定性的魯棒性,提高了智能汽車緊急主動避障的整體性能,保證了智能電動汽車緊急主動避障的實(shí)時性和穩(wěn)定性。此外,提出了考慮執(zhí)行器故障和側(cè)傾運(yùn)動的智能電動汽車轉(zhuǎn)向控制方法,有效提升了智能電動汽車轉(zhuǎn)向控制整體性能。

副教授

48V電動汽車純電驅(qū)動系統(tǒng)包含:驅(qū)動電機(jī)、電機(jī)控制器、電池模塊、儲能換電柜。該系統(tǒng)擁有國內(nèi)一流的驅(qū)動性能,采用矢量控制算法,具有國際先進(jìn)水平。采用該系統(tǒng)可實(shí)現(xiàn)車電分離、人工自主手動換電和電池梯次利用。該系統(tǒng)使用成本低、安全可靠、維修方便、續(xù)航無憂。該系統(tǒng)擁有各項(xiàng)核心技術(shù)、自主知識產(chǎn)權(quán),18項(xiàng)授權(quán)發(fā)明專利。已形成五個電機(jī)型號和三個控制器型號,風(fēng)冷、油冷和水冷等一體化驅(qū)動系統(tǒng),已通過國家強(qiáng)檢。

教授

(1)發(fā)明的磁流變電控減振器/懸置大幅度提升了磁流變液的有效使用率,降低了應(yīng)用成本;經(jīng)實(shí)驗(yàn)測試標(biāo)定,執(zhí)行器響應(yīng)時間<15ms。
(2)開發(fā)的電控減振器在匹配自主開發(fā)控制器后,提升了采用被動懸架的某量產(chǎn)車型平順性20%~40%、操穩(wěn)性10%~15%。
(3)電控減振器及其系統(tǒng)動態(tài)特性測試系統(tǒng)(包括響應(yīng)時間自標(biāo)定系統(tǒng)、動態(tài)可控力特性評價系統(tǒng))、非線性控制系統(tǒng)均已完備。

副教授

北京化工大學(xué)

北京科技大學(xué)

長沙理工大學(xué)

重慶大學(xué)

大連理工大學(xué)

東南大學(xué)

桂林電子科技大學(xué)

合肥工業(yè)大學(xué)

河北工業(yè)大學(xué)
華中科技大學(xué)
吉林大學(xué)

江蘇大學(xué)

江蘇理工學(xué)院

遼寧工業(yè)大學(xué)

山東大學(xué)

山東理工大學(xué)

上海工程技術(shù)大學(xué)

上海交通大學(xué)

上海理工大學(xué)

天津職業(yè)技術(shù)師范大學(xué)

同濟(jì)大學(xué)

西安交通大學(xué)

西華大學(xué)

西南交通大學(xué)

廈門大學(xué)

鹽城工學(xué)院

浙江工業(yè)大學(xué)